Translating recurring UAP signatures into testable field-coupled mobility systems
NRGscapes LAB brings together observational research, field physics, boundary-layer analysis, materials concepts, control architecture and staged validation into a coherent engineering pathway.
The aim is not to present a completed craft. It is to show how recurring UAP signatures can be treated as design constraints, translated into system requirements, organised into a testable architecture and developed progressively through modelling, component testing and unmanned demonstration.
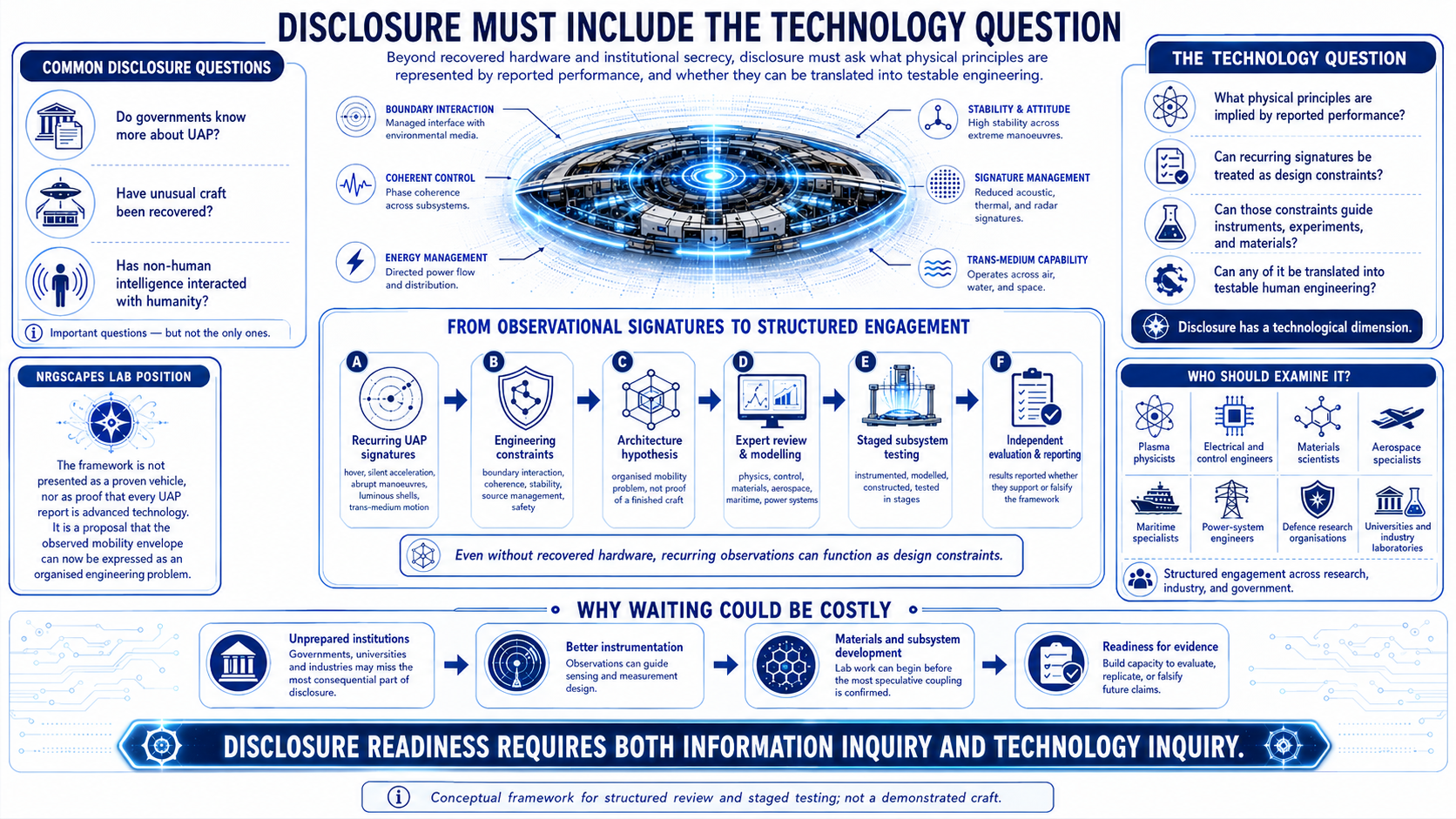
Why the technology question matters
Disclosure is not only about what governments may know, whether unusual craft have been recovered or whether non-human intelligence has interacted with humanity. It also raises a technical question: what physical principles may be represented by recurring reported performance, and can those principles be translated into testable human engineering?
Explore Research Intelligence
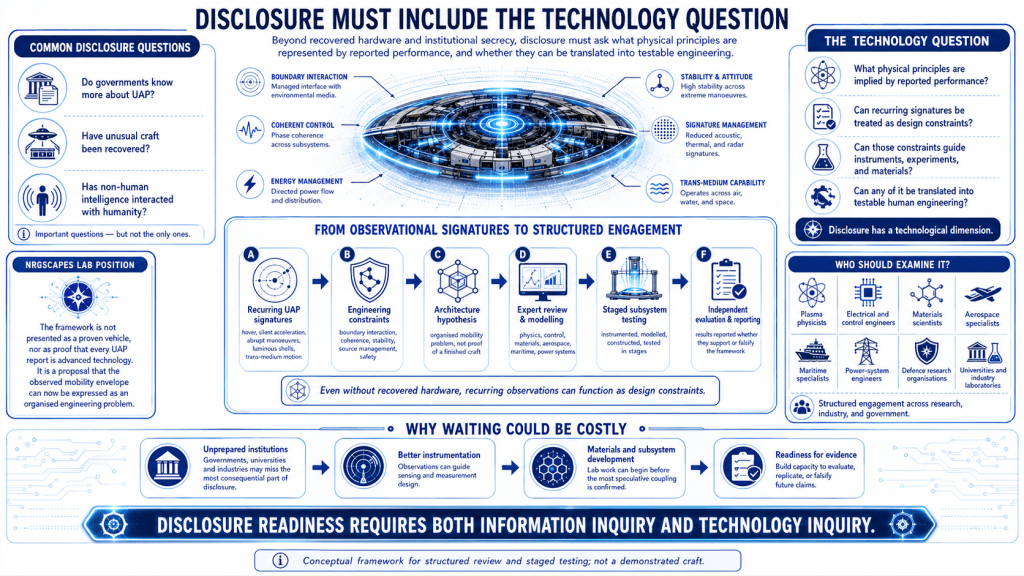
Disclosure Must Include the Technology Question
Recurring UAP signatures can be examined as engineering constraints, even without confirmed recovered hardware.
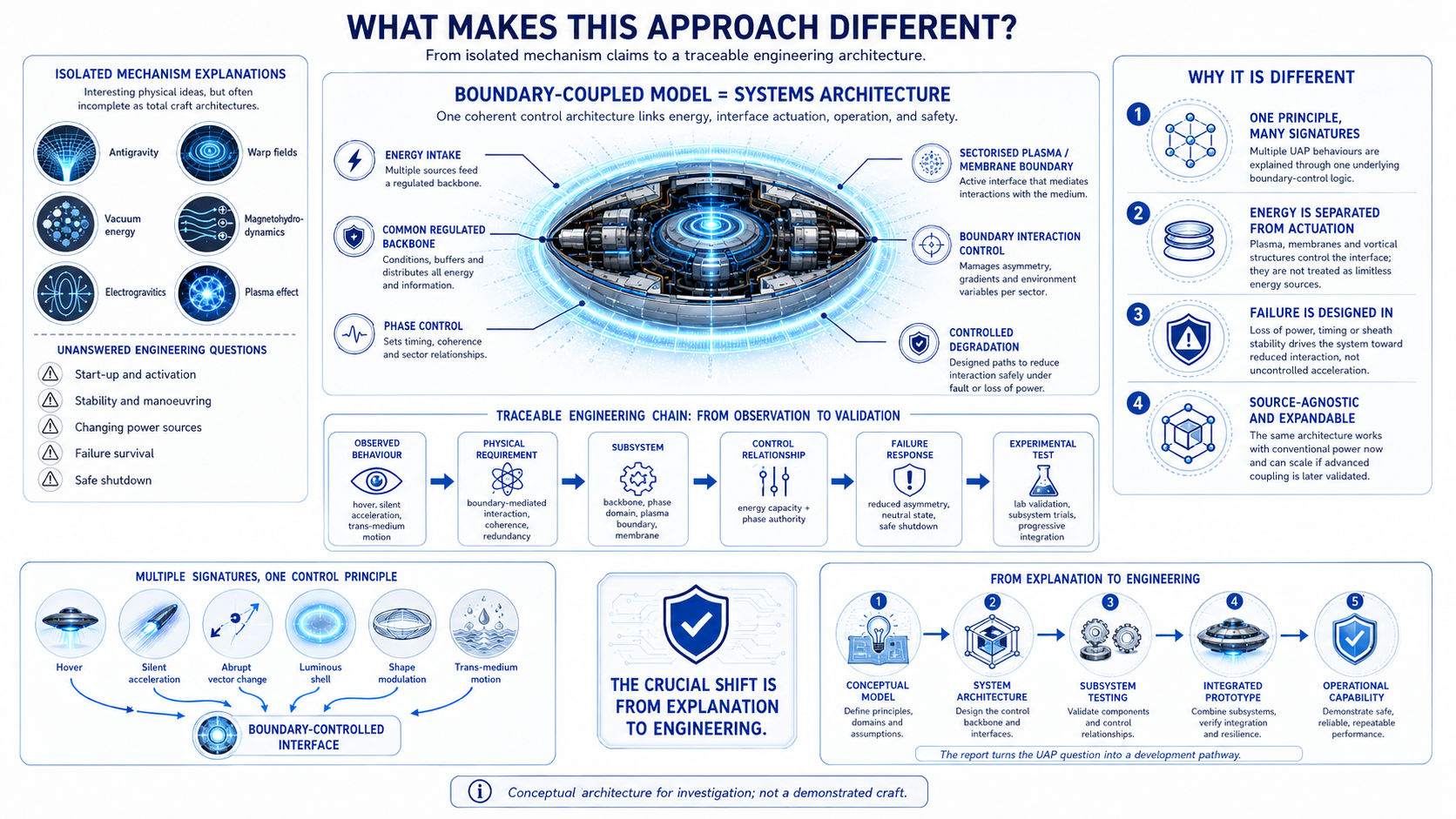
From isolated mechanisms to a systems architecture
The NRGscapes approach does not rely on one isolated explanation such as plasma effects, electrogravitics, vacuum energy or warp-field concepts. It asks how energy, phase control, materials, boundary actuation, sensing, failure management and environmental interaction must operate together as one coherent system.
Explore Physics and Mechanisms
Explore Subsystems and Engineering Gaps
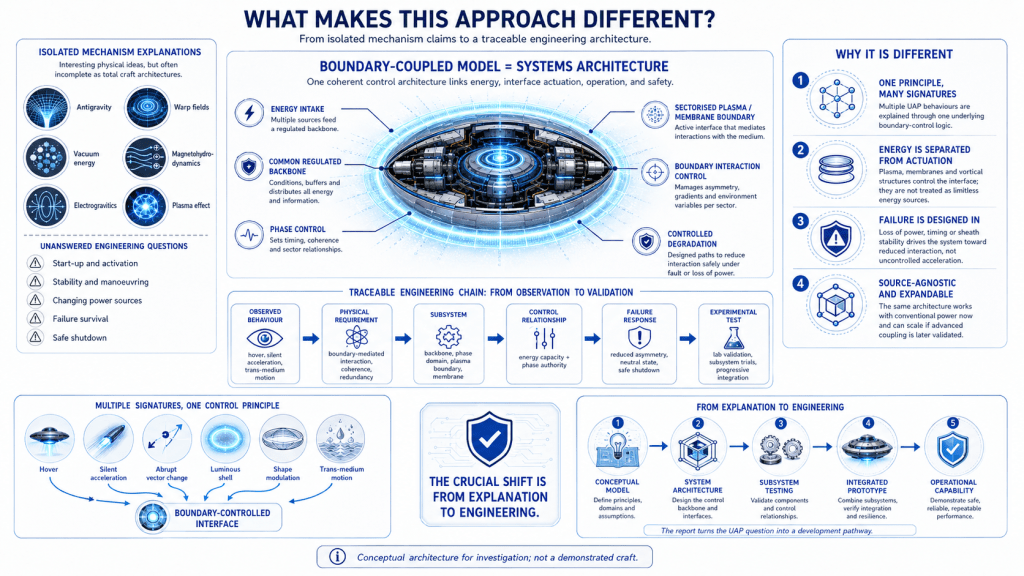
What Makes This Approach Different?
The key shift is from explaining individual effects to engineering a traceable, controllable and testable architecture.
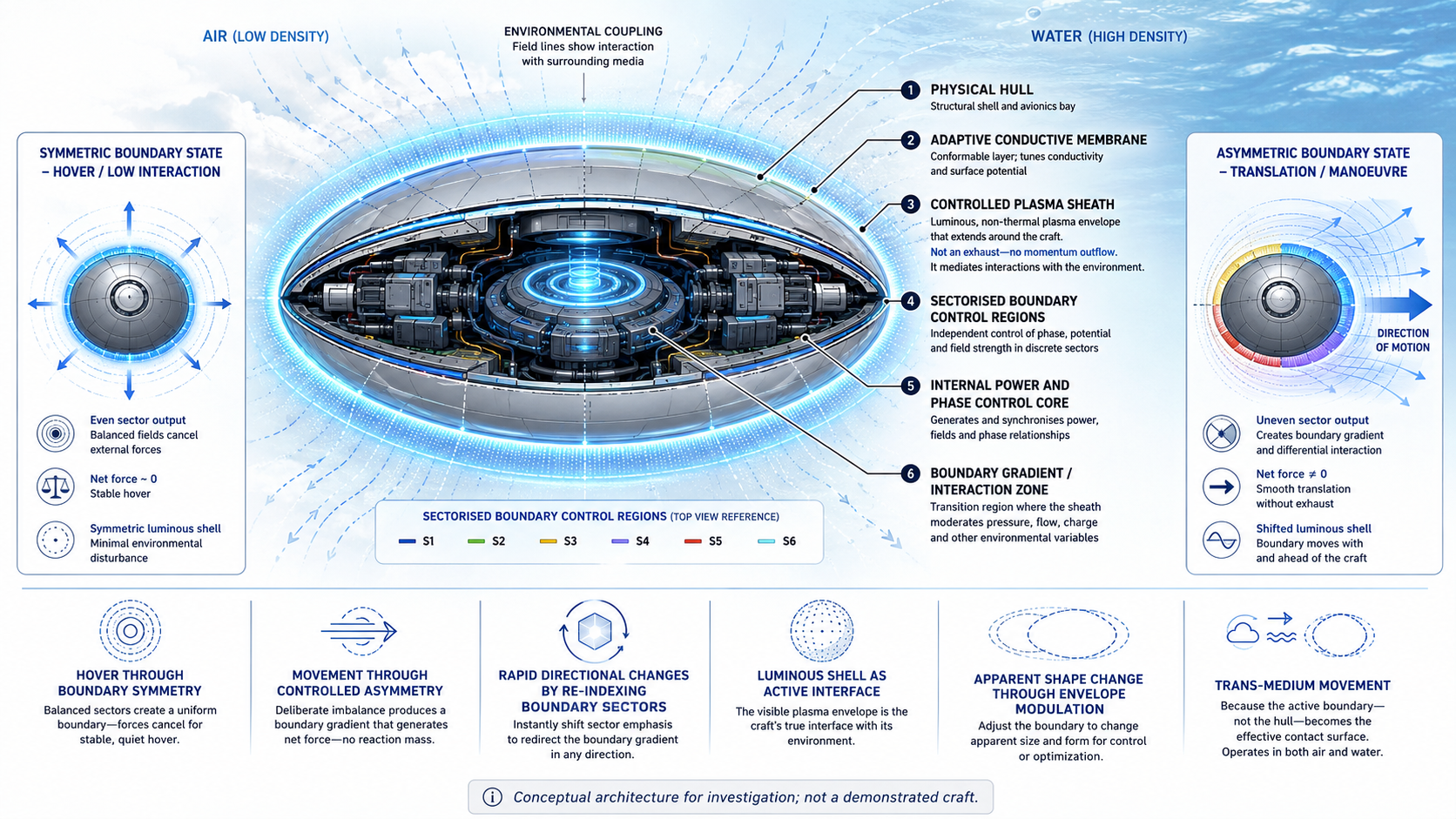
How the proposed mobility principle works
The architecture reframes movement as a boundary-interaction problem rather than a conventional thrust problem. A symmetric boundary supports stable hover or low interaction. Deliberate asymmetry creates a directional gradient, while sector re-indexing changes manoeuvre direction and boundary modulation alters apparent form or operating state.
Explore Boundary, Materials and Control
Explore Field-Coupled Craft
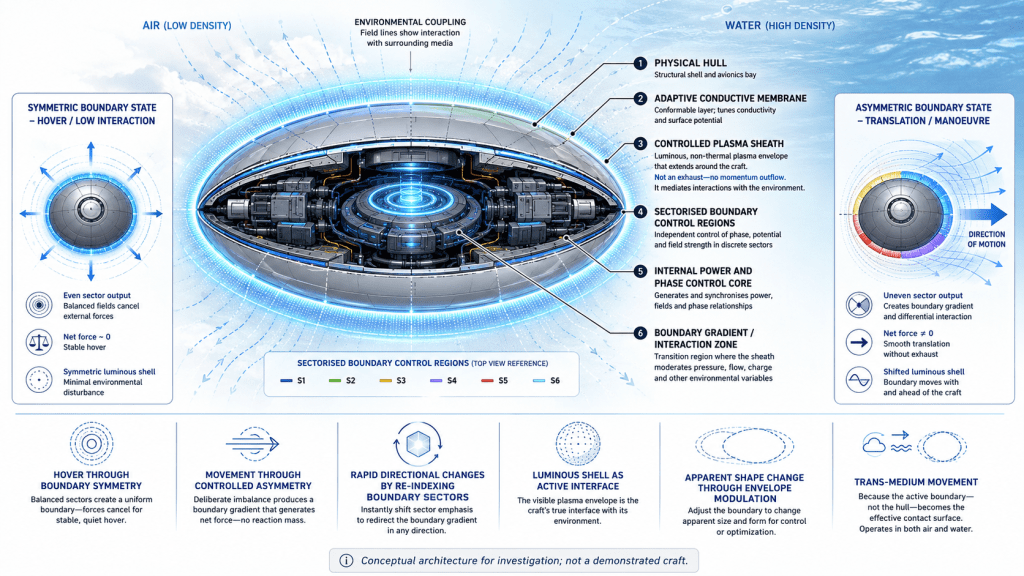
Boundary-Coupled Mobility Architecture
Symmetry produces stability; controlled asymmetry produces translation and manoeuvre.
Power provides capacity; phase provides authority
Energy delivery, timing and boundary command must remain functionally separate. Multiple energy sources may feed a regulated backbone, but no source should directly control the boundary. Stable operation depends on phase coherence, sector relationships, arbitration and safe shutdown—not simply on increasing power.
Explore Subsystems and Engineering Gaps
Explore Requirements and Development Baseline
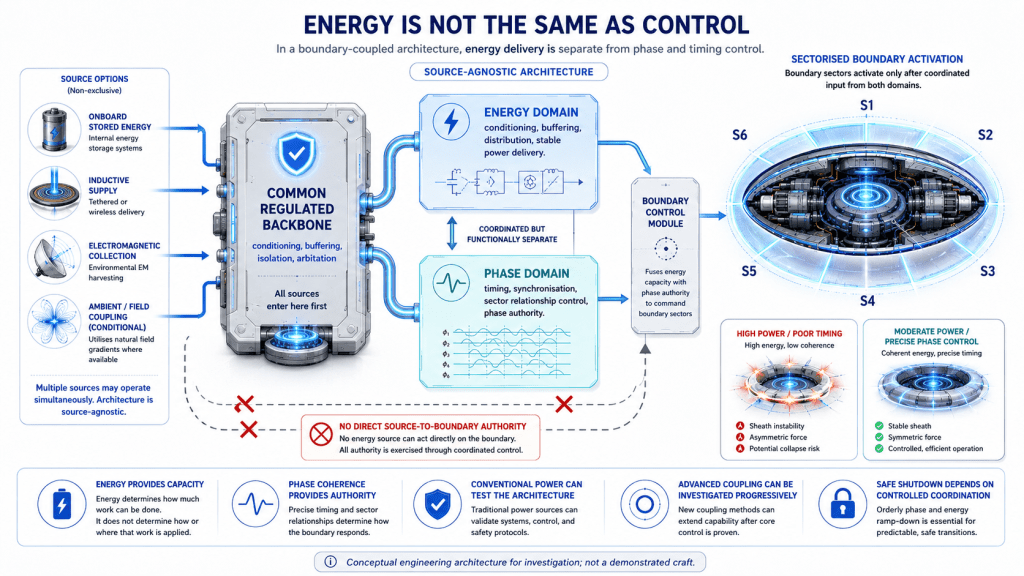
Energy Is Not the Same as Control
High power without precise timing produces instability; coordinated energy and phase control produce a stable boundary.
From measurable effects to a new mobility pathway
Successful testing would not begin with a fully operational trans-medium craft. It would begin with measurable boundary effects, repeatable control, correct energy and momentum accounting, artefact exclusion and independent verification. Only then could the program progress toward integrated subsystems, unmanned flight and cross-medium demonstrations.
Explore Experimental Development Pathway
Explore Testing and Prototype Pathway
Explore Validation and Stakeholder Pathways
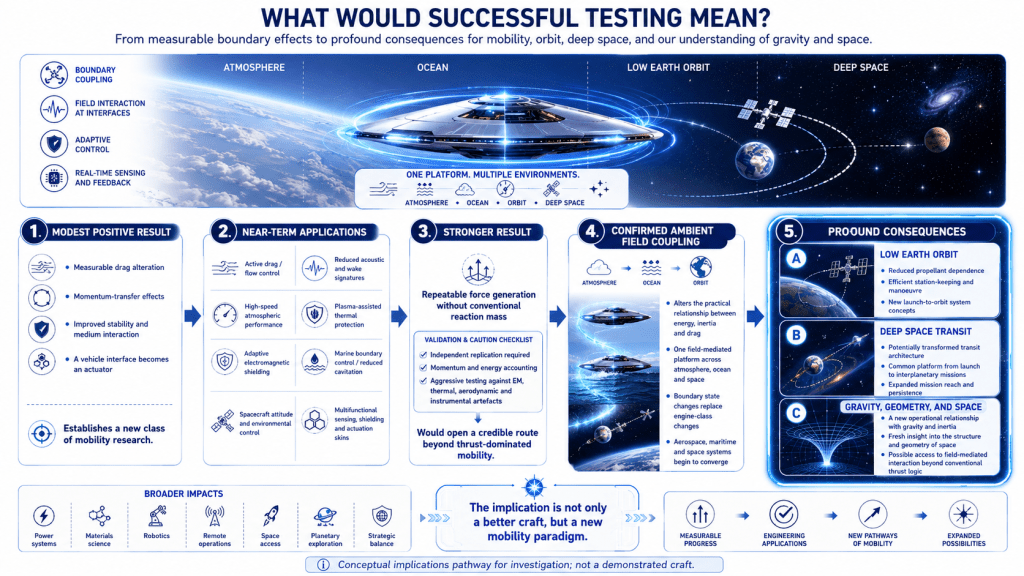
What Would Successful Testing Mean?
Progress begins with modest, measurable effects and advances only through repeatable, controlled and independently verified results.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}